
This Website
With a focus on a minimalistic asthetic, this website was made with vanilla HTML and CSS.
It also incorporates elements of responsive
design, has an email form, and a custom search box.
Source
code
Robotics Team Website
This was a website made for my robotics team using HTML and Twitter's Bootstrap framework.
It features a single page design with striking fullscreen parallax elements.
Visit
Source
code


Autonomous Vehicles
CAVAS
is University at Buffalo's
autonomous vehicle initiative.
We have various sensors, including camera and lidar, mounted on a Lincoln MKZ
which can be driven autonomously using drive-by-wire. The drive computer uses Autoware, a software stack based on ROS, to process sensor data
and control the vehicle.
I personally developed the object detection, sensor fusion, and obstacle
avoidance software for this project.
Project
website
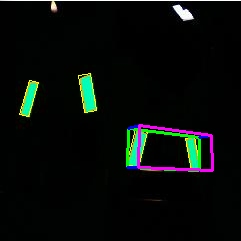
Robotics Vision Processing
Designed to run on a Raspberry
Pi, this is a localization program that can determine a robot's 3D position and rotation
relative to two strips of retroreflective tape.
This program uses OpenCV for vision
processing and was used as part of the 2019 FIRST Robotics
Competition.
I also contributed a lot to the rest of my robotics team's codebase, which can be found here.
Source
code
Motor Learning Program
This program was written as part of a paper submitted to a 2018 IEEE conference.
It uses the Unity3D engine and
Leap Motion infrared sensor
to collect data on stroke patients while they perform a motor learning assessment.
View
paper
Source
code